1. Innledning, historikk og endringslogg
1.1. Innledning
Denne spesifikasjonen detaljerer etablering og forvaltning av punktskyer fra forskjellige sensorer montert på forskjellige platformer.
En punktsky består av en stor mengde enkeltstående punkt uten noen relasjon til hverandre. I tillegg til XYZ koordinater, kan hvert punkt ha en rekke berikende atributter som gjør det mulig å sette punktet i sammenheng. Et eksempel på en slik atributt er klassifisering hvor punktet tilegnes en definert klasse slik som bakkepunkt, brudekke eller støy. Punktene kan også tilegnes fargeverdier fra foto for enklere tolking.
Punktskyene produseres med forskjellige metoder som hver gir forskjellige egenskaper. Topografiske punktskyer etableres enten med et LiDAR system eller ved bruk av fotogrammetriske metoder (bildematching). Batymetriske punktskyer etableres enten med et LiDAR system eller med et multistråle ekkolodd. Selv om punktskyene fra de forskjellige sensorene utveksles over samme datamodell er det viktig på presisere at de er fundamentalt forskjellige og dekker opp forskjellige behov.
Punktskyen ansees som et primærprodukt, og for praktisk bruk vil det være hensiktsmessig å avlede et uniformt grid eller en triangelmodell.
Primært skal spesifikasjonen gi et rammeverk for bestilling av punktskydatasett, men dokumentet vil også være en referanse for datasett som forvaltes i høydedata.no.
1.2. Historikk
Rammeverket i Produktspesifikasjon Punktsky 1.0 tar utgangspunkt i og bygger videre på Produktspesifikasjon FKB-Laser v3.0 2021-01-01.
-
Punktsky 1.0.0 - 2022-01-01
-
Punktsky 1.0.1 - 2022-03-11
-
Punktsky 1.0.2 - 2022-03-31
-
Punktsky 1.0.3 - 2023-02-01
1.3. Endringslogg
1.3.1. Innhold i endringsloggen
Punktsky 1.0 erstatter produktspesifikasjonen FKB-Laser 3.0. For terrestrisk LiDAR videreføres i stor grad det eksisterende rammeverket. Nye kartleggingsmetoder introduseres og standarden innbefatter også en ny hovedkategori "Egendefinert" til hjelp i forvaltningen av punktskyer med ukjent nøyaktighet og opphav. Det vil ikke være tilstrekkelig å lese endringsloggen for å få et helhetlig bilde av Punktsky 1.0 og for å få et komplett bilde av produktspesifikasjonen må man lese dokumentasjonen som en helhet.
1.3.2. Endringer etter Punktsky 1.0:
-
(1.0.3) Presiseringer Kap 11
-
(1.0.3) Justering krav til fotavtrykk ALS, krav til vertikal nøyaktighet MBES og krav til tetthet ALB.
-
(1.0.2) Rettet feil i klassekode for vannflate
-
(1.0.1) Presisering fotavtrykk for Luftbåren Topografisk LiDAR
-
(1.0.1) Rettet feil krav til grunnrissnøyaktighet i bildematching for kategori Psky_1_DIM_C.
1.4. Normative referanser
[GEO-VEIL] : Geovekst veiledingsdokumentasjon
[PABG] : Produksjon av basis geodata
[ASPRS-LAS] : ASPRS LAS Specification 1.4 - R15
2. Definisjoner og forkortelser
2.1. Definisjoner
Topografi betyr stedsbeskrivelse, et landområdes terrengforhold, bebyggelse, kommunikasjoner og lignende. Topografien beskjeftiger seg med oppmåling og beskrivelse av områder på jordoverflaten; både på landoverflaten, landtopografi, og havoverflaten, havtopografi. (topografi i Store norske leksikon på snl.no. Hentet 6. januar 2022 fra https://snl.no/topografi)
MERKNAD: Sensorer som etablerer topografi betegnes som i standarden som topografiske sensorer. Eksempel Luftbåren Topografisk LiDAR.
Batymetri beskriver terreng- og høydeforhold for hav- og sjøbunn.
MERKNAD: Sensorer som etablerer batymetri betegnes som i standarden som batymetriske sensorer. Eksempel luftbåren batymetrisk liDAR og multistråle ekkolodd.
En digital representasjon av høydeverdier som varierer over en flate.
MERKNAD: En DHM er en samling av et stort antall høydepunkter på en flate. Punktene kan være organisert som et regelmessig rutenett eller i et mer uregelmessig mønster. Den siste metoden vil normalt gi den beste beskrivelsen av flaten. Alternativ engelsk betegnelse er ”Digital Elevation Model (DEM)”.
En DHM som beskriver terrengoverflaten uten vegetasjon, bygninger og andre objekter.
En DHM som beskriver overflaten av terrenget inkludert objekter som vegetasjon, bygninger etc.
MERKNAD: Alternativ engelsk betegnelse er «Digital Surface Model (DSM)».
Måling av avstand mellom en lasersensor, i fly eller helikopter, og terrengoverflaten.
MERKNAD: Flybåren laserskanning kalles også laseraltimetri.
Punktsky generert ved hjelp av fotogrammetriske metoder.
MERKNAD : Kalles også bildematching eller med den engelske betegnelsen «dense image matching»
Måling av avstand ved hjelp av akkustikk under vann.
MERKNAD: Kalles også MBES fra den engelske betegnelsen «Multi Beam Echo Sounding».
Måling av avstand mellom en lasersensor plassert på «bakkenivå» og objekter rundt sensoren.
MERKNAD: Sensorer montert på kjøretøy, stativ eller håndholdte sensorer passer alle inn her.
Helheten av egenskaper en enhet har og som vedrører dens evne til å tilfredsstille uttalte og underforståtte behov [NS-ISO 8402 def. 2.1].
MERKNAD: I Geodatastandarden er det definert seks kvalitetselementer:
-
stedfestingsnøyaktighet
-
egenskapsnøyaktighet
-
logisk konsistens (kontroll av logiske regler/sammenhenger)
-
fullstendighet
-
datasettets historikk og tidligere bruk
-
tilgjengelighet og leveringstid
Lasersensorens opptaksområde på overflaten.
MERKNAD: Størrelsen på fotavtrykket sier noe om hvor små detaljer man i praksis kan detektere. Alternativ engelsk betegnelse er ”footprint”.
Antall punkter som treffer en flate pr. m2.
Laserstrålens vinkel i forhold til sensorens referansesystem.
Informasjon som beskriver et datasett.
MERKNAD: Hvilke opplysninger som inngår i metadataene, kan variere avhengig av datasettets karakter. Vanlige opplysninger er innhold, kvalitet, tilstand, struktur, format, produsent og vedlikeholdsansvar.
Detaljert beskrivelse av ett datasett eller en serie med datasett med tilleggsinformasjon som gjør det mulig å produsere, distribuere og bruke datasettet av andre (tredjepart).
MERKNAD: En dataproduktspesifikasjon kan lages for produksjon, salg, sluttbrukervirksomhet eller annet.
2.2. Forkortelser
FvL: Forvaltningsløsning Høydedata
NDH: Nasjonal detaljert høydemodell
NHM: Nasjonal høydemodell (produktene fra prosjektet NDH)
DHM: Digital høydemodell
DOM: Digital overflatemodell
DTM: Digital terrengmodell
FKB: Felles KartdataBase
ALS: Airborne Laser Scanning
ALB: Airborne Lidar Bathymetry
LIDAR: Light Detection And Ranging, betegner et prinsipp for avstandsmålingen
MBES: Multi-Beam Echo Sounding
SOSI: Samordnet Opplegg for Stedfestet Informasjon - et standardformat for digitale geodata (SOSI-standarden)
UML: Unified Modelling Language. Modelleringsspråk som brukes til å beskrive geografiske datamodeller
3. Generelt om spesifikasjonen
3.6. Temakategori
punktsky, laser, fotogrammetrisk punktsky, batymetri, høydedata, dybdedata, digital terrengmodell (DTM), digital overflatemodell (DOM).
3.7. Sammendrag
Denne spesifikasjonen detaljerer etablering og forvaltning av høydebærende datasett fra forskjellige platformer og sensorer.
3.8. Formål
Referansedokument for bestilling av punktskyer og dokumentasjon av datasett lagret i gjeldende forvaltningsløsning.
3.11. Utstrekningsinformasjon
Utstrekningbeskrivelse
FKB-data dekker Norges fastlandsterritorium
Geografisk område
Nord: 72°
Sør: 57°
Øst: 32°
Vest: 4°
Vertikal utbredelse
Fra ca -250 m til ca 2500 m
Innhold gyldighetsperiode
Ikke angitt
5. Innhold og struktur
Produktspesifikasjonen er bygget opp over en matrise hvor kolonnene representerer datasettkategorier og radene representerer felleskrav og krav per sensortype.
Datasettkategoriene er primært bestemt av krav til nøyaktighet. Punkttettheten for hver kategori er et minimumskrav og settes per prosjekt. ‘Egendefinert’ er en åpen kategori som muliggjør forvaltning av datasett som ikke følger standarden i høydedata.no. Følgende kategorier er benyttet:
-
Høy nøyaktighet og tetthet
-
Middels nøyaktighet og tetthet
-
Minimum nøyaktighet og tetthet
-
Egendefinert
Spesifikasjonen omhandler krav til følgende sensortyper og datakilder:
-
Luftbåren topografisk LiDAR
-
Luftbåren batymetrisk LiDAR
-
Terrestrisk topografisk LiDAR
-
Multistråle ekkolodd
-
Fotogrammetrisk Konstruerte Punktksyer (Bildematching)
Ikke alle sensortyper er egnet for bestilling i alle kategorier. Der hvor det ikke anbefales å benytte gitt sensor, er det satt en 'x' i tabellen.
5.1. Felleskomponenter
For de fire kategoriene (Høy, Middels, Minimum og Egendefinert) er det et sett med krav som er uavhengige av sensor.
| Kategorier | Høy | Middels | Minimum | Egendefinert |
|---|---|---|---|---|
Beskrivelse |
Detaljkartlegging |
Prosjektering |
NDH |
Diverse |
ID |
A |
B |
C |
E |
Minimum Tetthet |
Høyere enn 10 |
5 til 10 |
2 til 5 |
Egendefinert |
Kartbladinndeling |
1 : 500 |
1 : 1000 |
1 : 1000 |
- |
Fullstendighet |
80% (2x2 innenfor 10x10) |
95% (10x10) innenfor prosjekt |
95% (10x10) innenfor prosjekt |
- |
Feilklassifisering |
2% |
2% |
2% |
- |
Feilklassifisering - 'Objekt' |
2% |
2% |
2% |
- |
Antall bakkepunkt referanseflater |
80% |
80% |
80% |
- |
5.2. Luftbåren Topografisk LiDAR
Klassisk luftbåren LiDAR.
Krav til datafangst, prosessering og leveranse er utfyllende beskrevet i PaBG.
| Kategorier | Høy | Middels | Minimum | Egendefinert | |
|---|---|---|---|---|---|
Kategori ID |
Psky_1_ALS_A |
Psky_1_ALS_B |
Psky_1_ALS_C |
Psky_1_ALS_E |
|
Vertikal Nøyaktighet |
Standardavvik (1 sigma) |
0,03 |
0,04 |
0,04 |
Egendefinert |
Vertikal Nøyaktighet |
Systematisk |
0,05 |
0,10 |
0,10 |
Egendefinert |
Horisontal Nøyaktighet |
Standardavvik (1 sigma) |
0,05 |
0,10 |
0,20 |
Egendefinert |
Horisontal Nøyaktighet |
Systematisk |
0,15 |
0,30 |
0,30 |
Egendefinert |
Maksimum Punktavstand |
0,32 |
0,45 |
0,70 |
Egendefinert |
|
Maksimum Fotavtrykk |
(1/e2) |
0,25 |
0,5 |
0,75 |
Egendefinert |
Maksimum Skannevinkel |
pluss / minus |
20 |
20 |
20 |
Egendefinert |
Obligatoriske Klasser |
1+2+7+17+21 |
1+2+7+17+21 |
1+2+7+17+21 |
1+7 |
|
NHM Oppdateres |
Ja |
Ja |
Ja |
Nei |
5.3. Luftbåren Batymetrisk LiDAR
Punktsky etablert med en flybåren batymetrisk LiDAR sensor. Batymetrisk LiDAR er også kjent som 'Grønnlaser'. Faktisk rekkevidde ned i vannkolonne avhenger av sensortype og en kombinasjon av siktforhold og bunnens evne til å reflektere laserenergien. Ikke alle områder er derfor egnet for kartlegging med ALB system.
For krav til datafangst, prosessering og leveranse henvises det til PaBG Kap7 "Kartlegging med flybåren laserskanning"
Klasseinndelingen tar utgangspunkt i ASPRS LAS Domain Profile Description: Topo-Bathy Lidar (July 17, 2013)
| Kategorier | Høy | Middels | Minimum | Egendefinert | |
|---|---|---|---|---|---|
Kategori ID |
Psky_1_ALB_A |
Psky_1_ALB_B |
Psky_1_ALB_C |
Psky_1_ALB_E |
|
Vertikal Nøyaktighet (Presisjon) |
Standardavvik (1 sigma) |
x |
0.15 + 0.005*dybde |
x |
Egendefinert |
Vertikal Nøyaktighet (Absolutt) |
Systematisk |
x |
0.10 |
x |
Egendefinert |
Horisontal Nøyaktighet |
Standardavvik (1 sigma) |
x |
1.70 + 0,05*dybde |
x |
Egendefinert |
Horisontal Nøyaktighet |
Systematisk |
x |
0.30 |
x |
Egendefinert |
Maksimum Skannevinkel |
pluss / minus |
x |
20 |
x |
Egendefinert |
Obligatoriske Klasser |
x |
40+41+42+45 |
x |
40+41+42+45 |
|
NHM Oppdateres |
x |
Nei |
x |
Nei |
5.4. Terrestrisk Topografisk LiDAR
Punktsky sanket fra bakkenivå med mobil platform eller statisk oppstilling.
Krav til datafangst må spesifiseres per prosjekt.
| Kategorier | Høy | Middels | Minimum | Egendefinert | |
|---|---|---|---|---|---|
Kategori ID |
Psky_1_TLS_A |
Psky_1_TLS_B |
Psky_1_TLS_C |
Psky_1_TLS_E |
|
Vertikal Nøyaktighet |
Standardavvik (1 sigma) |
0,03 |
x |
x |
Egendefinert |
Vertikal Nøyaktighet |
Systematisk |
0,05 |
x |
x |
Egendefinert |
Horisontal Nøyaktighet |
Standardavvik (1 sigma) |
0,05 |
x |
x |
Egendefinert |
Horisontal Nøyaktighet |
Systematisk |
0,15 |
x |
x |
Egendefinert |
Obligatoriske Klasser |
1+2+7+17+21 |
x |
x |
1+7 |
|
NHM Oppdateres |
Nei |
x |
x |
Nei |
5.5. Multistråle Ekkolodd
Punktsky etablert med høyfrekvent gruntvannsekkolodd.
For krav til datafangst benyttes Kartverket Sjø Teknisk kravspesifikasjon for sjømåling ver 3.00. Hvert enkelt prosjekt må spesifisere hvilke deler i standarddokumentet som er gjeldende for kartleggingsoppgaven.
| Kategorier | Høy | Middels | Minimum | Egendefinert | |
|---|---|---|---|---|---|
Kategori ID |
Psky_1_MBES_A |
Psky_1_MBES_B |
Psky_1_MBES_C |
Psky_1_MBES_E |
|
Vertikal Nøyaktighet (Presisjon) |
Standardavvik (1 sigma) |
x |
0.08 + 0.002*dybde |
x |
Egendefinert |
Vertikal Nøyaktighet (Absolutt) |
Systematisk |
x |
0.12 + 0.002*dybde |
x |
Egendefinert |
Horisontal Nøyaktighet |
Standardavvik (1 sigma) |
x |
- |
x |
Egendefinert |
Horisontal Nøyaktighet |
Systematisk |
x |
0.20 + 0.016*dybde |
x |
Egendefinert |
Obligatoriske Klasser |
x |
40 |
x |
40 |
|
NHM Oppdateres |
x |
Nei |
x |
Nei |
5.6. Bildematching
Punktsky generert fra bildemateriale. Minimumskategorien beskriver punktsky generert fra en klassisk omløpsoppgave. Middels tetthet definerer punktskyer generert fra en standard Geovekst-bestilling.
| Kategorier | Høy | Middels | Minimum | Egendefinert | |
|---|---|---|---|---|---|
Kategori ID |
Psky_1_DIM_A |
Psky_1_DIM_B |
Psky_1_DIM_C |
Psky_1_DIM_E |
|
Grunnlagsfoto / AT |
x |
GSD4-10 |
GSD25 |
Egendefinert |
|
Oppløsning DSM |
x |
0,2 |
0,5 |
Egendefinert |
|
Avledet Punkttetthet |
x |
25 |
4 |
Egendefinert |
|
Overlapp |
x |
L80% S(20% til 80%) |
L80%+S20% |
Egendefinert |
|
Vertikal Nøyaktighet |
Standardavvik (1 sigma) |
x |
- |
- |
Egendefinert |
Vertikal Nøyaktighet |
Systematisk |
x |
0,12-0,18 |
0,30-0,75 |
Egendefinert |
Horisontal Nøyaktighet |
Standardavvik (1 sigma) |
x |
- |
- |
Egendefinert |
Horisontal Nøyaktighet |
Systematisk |
x |
0,08-0,12 |
0,20-0,50 |
Egendefinert |
Obligatoriske Klasser |
x |
1+7+9 |
1+7+9 |
1+7 |
|
NHM Oppdateres |
x |
Nei |
Nei |
Nei |
6. Referansesystem
6.1. Romlig referansesystem
6.1.3. Ansvarlig organisasjon for referansesystemet:
Kartverket / The international Association of Oil & Gas Producers
6.1.4. Link til mer info om referansesystemet:
www.kartverket.no/SOSI / https://epsg.org/
6.1.6. Identifikasjonskode:
Se Tabell 7 under Kapittel 6.1.7.
6.1.7. Kodeversjon
SOSI-del 1, SOSI-realisering SOSI-GML versjon 5.1 / EPSG Geodetic Parameter Dataset, version 8.0, august 2012
| Referansesystem | EPSG-kode (GML/JSON-format) | SOSI-kode (SOSI-format) |
|---|---|---|
EUREF89 UTM32 (2d) |
25832 |
Koordsys 22, Vert-datum ikke angitt |
EUREF89 UTM33 (2d) |
25833 |
Koordsys 23, Vert-datum ikke angitt |
EUREF89 UTM35 (2d) |
25835 |
Koordsys 25, Vert-datum ikke angitt |
EUREF89 UTM32 + NN2000 |
5972 |
Koordsys 22, Vert-datum NN2000 |
EUREF89 UTM33 + NN2000 |
5973 |
Koordsys 23, Vert-datum NN2000 |
EUREF89 UTM35 + NN2000 |
5975 |
Koordsys 25, Vert-datum NN2000 |
Ved distribusjon kan dataene transformeres til en rekke andre referansesystemer.
I hodet på LAS 1.4 formatet benyttes EPSG kodene 5972, 5973 og 5975.
7. Kvalitet
Det henvises til Produktspesifikasjon for Felles KartdataBase (Generell del) for beskrivelse av kvalitetsmodellen som er benyttet.
7.1. Krav til punkttetthet
Det opereres med to metoder for beregning av punkttetthet og hvilken som skal benyttes avhengig av bestillingskategori.
For kategorien A (Høy) skal 80% av alle 2mx2m celler innenfor 10mx10m innfri krav til punkttetthet. Se figur Krav til Punkttetthet - Høy og Middels Tetthet for eksempel. Tetthet skal beregnes på de klasser som er med å bygge terrengmodell. For Luftbåren Topografisk LiDAR skal klasse 2 bakke benyttes. For Luftbåren Batymetrisk LiDAR og Multistråle Ekkolodd skal klasse 2 bakke og klasse 40 bunn inngå.
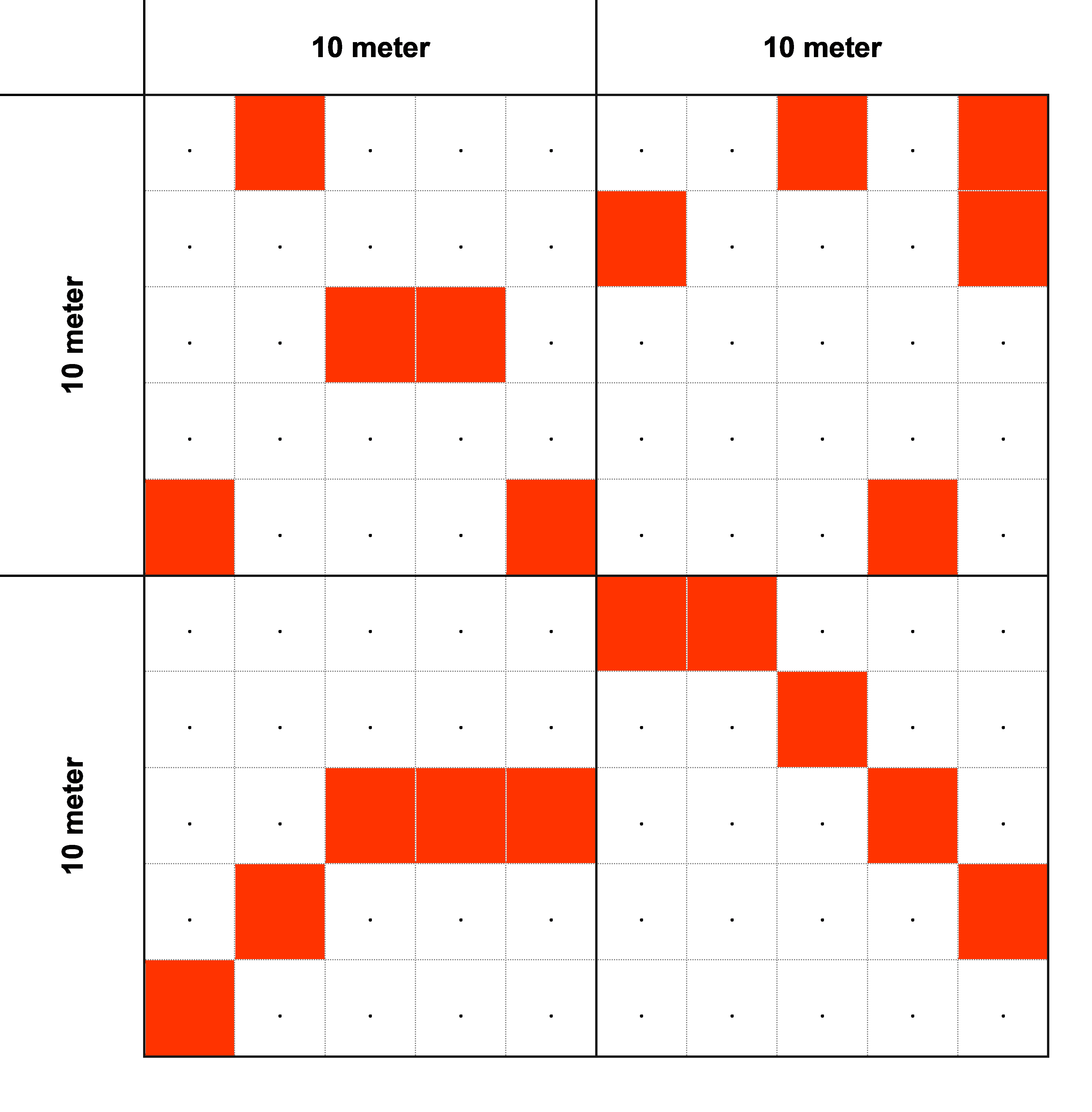
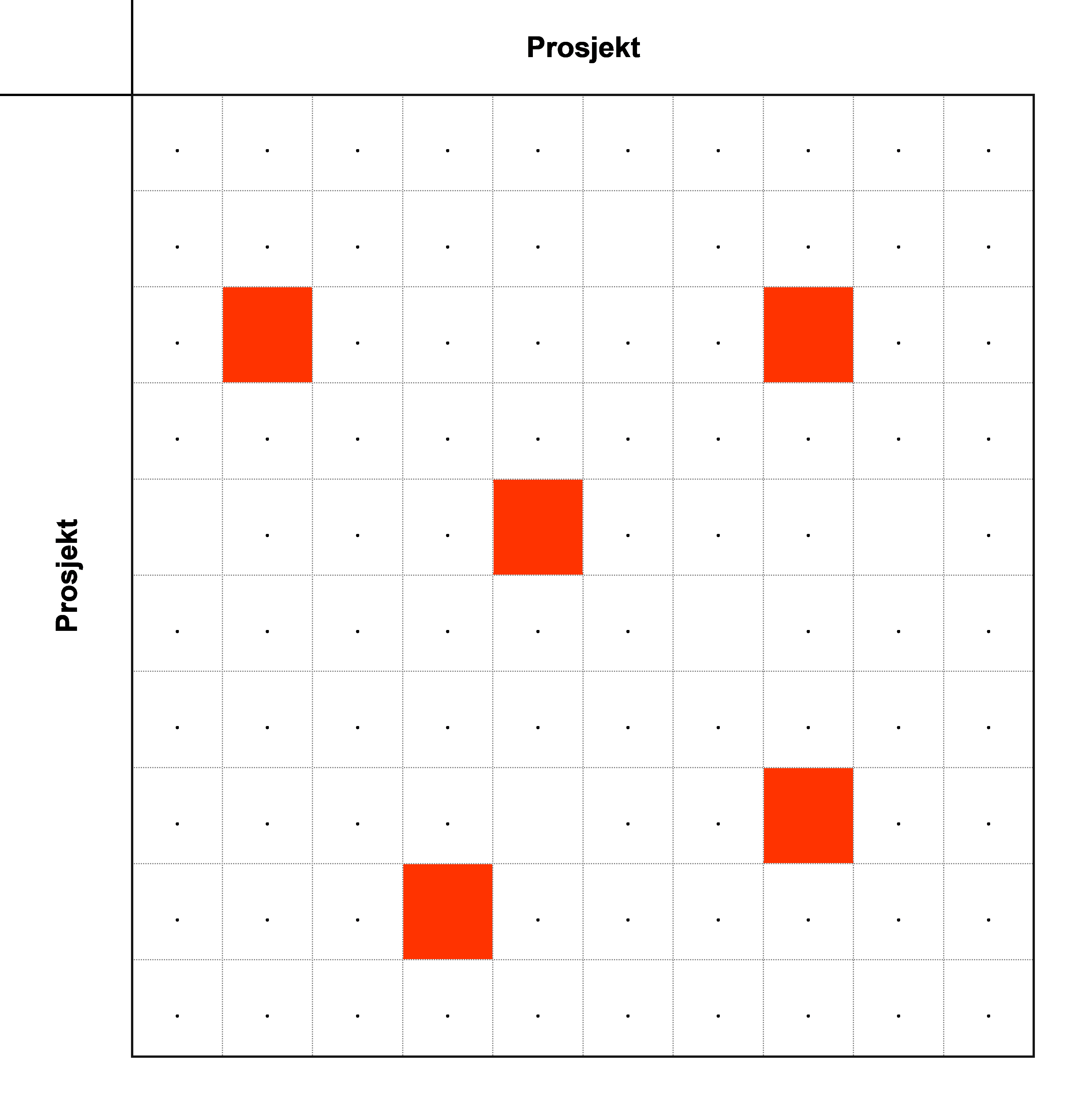
For Kategori B (Middels) og C (Minimum) skal 95% av 10mx10m celler innfri krav til tetthet. Førsteretur skal benyttes i beregning av punkttetthet. Se figur Krav til Punkttetthet - Lav Tetthet.
7.2. Nøyaktighet
Krav til nøyaktighet er detaljert per sensortype i Kapittel 5 og begrepene 'Systematisk Avvik' og 'Standardavvik' tolkes som vist i tabellene Krav til Vertikalnøyaktighet og Krav til Horisontalnøyaktighet.


8. Datafangst
Det henvises til standarden Produksjon av Basis Geodata (gjeldende versjon), for hvordan laserskanning fra luftbåren sensor skal gjennomføres og rapporteres. Kravene gjelder for luftbåren LiDAR og i hovedtrekk for luftbåren Batymetrisk LiDAR.
For kartlegging med multistråle ekkolodd vises det til relevante føringer i Kartverket Sjø Teknisk kravspesifikasjon for sjømåling ver 3.00. Kravspesifikasjonen for hvert enkelt prosjekt detaljerer hvilken av delspesifikasjonene som er gjeldende.
9. Datavedlikehold
Datasettene ajourføres periodisk ved hjelp av ny heldekkende datafangst. Ajourføringen skjer ved behov, og kartleggingsfrekvens er avhengig av områdetypen. Byområder og utbyggingsområder ajourføres oftere enn spredt bebygde områder.
Data fra alle prosjekter skal leveres og forvaltes i hoydedata.no
11. Leveranse
11.1. Leveranse Punktsky
Punktskyen skal leveres på LAS format som detaljert i LAS Specification 1.4 - R15. Filene skal komprimeres til LAZ. Klassene relatert til batymetri tar utgangspunkt i inndeling presentert i ASPRS Specification Topo-Bathy Lidar
I henhold til LAS formatet skal standard GPS Time brukes istedenfor GPS Week Time. Tidspunktet er for utsendt puls og korrekt 'encoding tag' for GPS Time type må settes i 'LAS Header'.
Det skal benyttes 'Point Data Record' 6 til 10 avhengig av faktisk innhold. Minimumskrav er 'Point Data Record' 6.
Ut over standard parametre skal følgende kodes inn i leveransen:
| Attributt | Kommentar |
|---|---|
Header / System Identifier |
Sensorsystem skal kodes i henhold til ASPRS Standard System Identifiers. |
Header / Projection |
Skal kodes i henhold til kap 3.2.2 i LAS Specification 1.4 - R15 (OGC Coordinate System WKT Record). |
Point Record / Scanner Channel |
Rapport skal detaljere faktisk skanner kanal regime som er benyttet i prosjektet. |
Point Record / User Data |
Felt som muliggjør enkel informasjon per punkt. Eventuell bruk skal detaljeres i rapporten. |
Point Record / Point Source ID |
Unik ID for datafangstlinjenummer skal kodes til denne attributten. Det skal være en til en relasjon mellom Point Source og ..STRIPENUMMER i metadatasett. |
Datasett skal klippes i henholdsvis 1:500 og 1:1000 kartblad. Kartbladindeks er beskrevet i Kart og Geodata - Tillegg D (side 108 og utover)
11.2. Leveranse Metadata
11.2.1. Områdeavgrensning
Områdeavgrensning(er) skal leveres på SOSI i henhold til datamodell detaljert i Kap13. Områdeavgrensningsfil skal navnes som følger:
-
<Prosjektnavn>_Prosjektavgrensning.sos
-
Eksempel: Trollfjorden 2021_Prosjektavgrensning.sos
11.2.2. Flystripe
Datafangstlinjer skal leveres på SOSI i henhold til datamodell detaljert i Kap13. Datafangstlinjer skal navnes som følger:
-
<Prosjektnavn>_Flystripe.sos
-
Eksempel: Trollfjorden 2021_Flystripe.sos
11.2.3. Homogenitetsplott
Homogenitetsplott skal leveres som GeoTIFF med 1m oppløsning som definert i PaBG. Homogenitetsplott skal ikke leveres for kategori 'Egendefinert'. Kartbladinndeling for homogenitetsplott skal følge LAS filinndelingen og hver tile skal navnes som følger:
-
<kartbladindeks>_Homogenitet.tif
-
Eksempel: 32-1-507-212-16_Homogenitet.tif
Alle tiles som bygger homogenitetsplottet skal komprimeres til zip kontainer som navngis som følger:
-
<Prosjektnavn>_Homogenitetsplott.zip
-
Eksempel: Trollfjorden 2021_Homogenitetsplott.zip
11.2.4. Kontrollflater
Alle kontrollflater benyttet i justering av punktsky skal leveres på SOSI format. Kontrollflatene lastes opp til underkatalog <Diverse> på høydedata.no. Merk at evt. høydejustering av punktskyleveransen skal dokumenteres i rapport. Kontrollflater behøver ikke leveres for kategori 'Egendefinert'.
11.3. Rapport
Hovedrapport skal leveres på PDF format iht. krav spesifisert i PaBG. Rapporten skal spesifisere hvilken realisasjon av høydereferansemodell som er benyttet.
Rapporten skal navngis:
-
<Prosjektnavn>_Prosjektrapport.pdf
-
Eksempel: Trollfjorden 2021_Prosjektrapport.pdf
Eventuelle vedlegg skal komprimeres til zip kontainer og lastes opp til [Diverse] katalog på høydedata.no med følgende navning:
-
<Prosjektnavn>_Vedlegg_Beskrivelse.zip
-
Eksempel: Trollfjorden 2021_Vedlegg_Landmålingsrapport.zip
11.4. Leveransestruktur
Datasettet skal leveres direkte i leverandørportal på høydedata.no. FvL forventer følgende katalogstruktur og navnekonvensasjon. Prosjektnavn må være det samme som tildelt i FvL:
<<Prosjektnavn>> [] *.laz [Metadata]\<Prosjektnavn>_Prosjektavgrensning.sos [Metadata]\<Prosjektnavn>_Flystripe.sos [Metadata]\<Prosjektnavn>_Prosjektrapport.pdf [Diverse]\<Prosjektnavn>_Homogenitet.zip [Diverse]\<Prosjektnavn>_Kontrollflater.sos [Diverse]\<Prosjektnavn>_Vedlegg.zip
13. Metadata
| I Produktspesifikasjon Punktsky 1.0 gjøres det ingen endringer i metadatasettene. Gjeldende implementasjon vil derfor være skreddersydd for klassisk flybåren LiDAR og det må gjøres tilpasninger for hvert enkelt prosjekt. Justering til metadata avtales i hvert enkelt prosjekt. |
13.1. Prosjektavgrensning
SOSI-fil som definerer prosjektområde. Skal ha følgende innhold:
.HODE |
|
..TEGNSETT UTF-8 |
|
..SOSI-VERSJON 4.5 |
|
..SOSI-NIVÅ 4 |
|
..OBJEKTKATALOG Punktsky 1.0 |
|
..TRANSPAR |
|
…ENHET |
0.01 |
…VERT-DATUM |
NN2000 |
…KOORDSYS |
Gjeldende UTM sone |
…ORIGO-NØ |
Lokalt origo skal ikke benyttes |
.KURVE 1: |
|
..OBJTYPE LaserDekningsområdeAvgrensning |
|
..DEKNINGSNUMMER "08777" |
Prosjektnummer |
.FLATE 1: |
|
..OBJTYPE LaserDekningsområde |
|
..OPPDRAGSGIVER "Kartverket" |
|
..DEKNINGSNUMMER "08777" |
Prosjektnummer |
..FKB-LASERSTANDARD "Psky_1_ALS_A" |
Unik ID for kategori og sensortype, Ref Tabeller i Kap 5. |
..FLYFIRMA "Laser AS" |
Firma ansvarlig for prosjektleveransen |
13.2. Flystripe (Datafangstlinje)
SOSI-fil som inneholder flyets/sensorens opptaksrute.
Flyhøyde, dato og innstillinger av instrumentet kan variere innenfor et dekningsområde og angis derfor på flystripe. For …LASERTYPE må Instrumentnavn og unik instrumentID settes sammen. Eksempel: "Riegl VQ-1560i - L735"
.HODE |
|
..TEGNSETT UTF-8 |
|
..SOSI-VERSJON 4.5 |
|
..SOSI-NIVÅ 2 |
|
..OBJEKTKATALOG Punktsky 1.0 |
|
..TRANSPAR |
|
…ENHET |
0.01 |
…VERT-DATUM |
NN2000 |
…KOORDSYS |
Gjeldende UTM sone |
…ORIGO-NØ |
Lokalt origo skal ikke benyttes |
.KURVE 1: |
|
..OBJTYPE LaserFlystripe |
|
..FLYDATO 20150502 |
Dato på ISO format: YYYYMMDD |
..FLYHØYDE 2085.61 |
|
..FLYFIRMA "Laser AS" |
Firma som utfører datafangst |
..DEKNINGSNUMMER 10887 |
Prosjektnummer |
..STRIPENUMMER 073 |
Stripenummer innenfor datafangstblokk |
..LASERINFORMASJON |
|
…LASERTYPE "Riegl VQ-1560i - L735" |
Sensornavn - Unik Sensor ID eller serienummer |
…PULSFREKVENS 295600 |
Pulsrepetisjonsfrekvens (Hz) |
…SKANNERVINKEL 13 |
Åpningsvinkel sentrert om nadir (Deg) |
…SKANNERFREKVENS 46.3 |
Skannefrekvens (Hz) |
14. Appendix A: Punktsky Klasseinndeling
Alle punkt, uavhengig sensortype og kategori, skal klassifiseries i henhold til følgende skjema som baserer seg på LAS Specification 1.4 - R15. Benyttes andre klasser enn de som er omhandlet i tabellen skal disse legges mellom 64 og 256.
| Klasse | ASPRS Beskrivelse | Beskrivelse | |
|---|---|---|---|
0 |
Created, never classified |
Aldri Klassifisert |
Skal ikke leveres. |
1 |
Unclassified |
Uklassifisert |
Alle punkt som ikke er aktivt klassifisert. |
2 |
Ground |
Terreng |
Punkt på bakke. Hvis ikke klasse 9 (vann) er benyttet skal alle punkt på vannoverflate til bakkeklasse. Faste store steiner skal klassifiseries til bakke. Løse steiner og steiner som er løsmasser etter ras klassifiseres til klasse 1 (uklassifisert). |
3 |
Low Vegetation |
Lav Vegetasjon |
Punkt på lav vegetasjon (Definerende høyde må spesifiseres per prosjekt). |
4 |
Medium Vegetation |
Middels Vegetasjon |
Punkt på middels vegetasjon (Definerende høyde må spesifiseres per prosjekt). |
5 |
High Vegetation |
Høy Vegetasjon |
Punkt på høy vegetasjon (Definerende høyde må spesifiseres per prosjekt). |
6 |
Building |
Bygning |
Punkt på bygningskropp. |
7 |
Low Point (Noise) |
Støy |
Støypunkt forårsaket av skyer, fugler, "multipath". Klassen omfatter unormalt høye og lave punkt (spikere). |
8 |
Model Key-Point (mass point) |
Skal ikke leveres. |
|
9 |
Watersurface |
Vannoverflate |
Punkter på vannoverflate. Vannflater større enn 100m2 og elver bredere enn 3m skal registreres (FKB-C) |
10 |
Rail |
Jernbane |
Punkt på jernbanespor. |
11 |
Road Surface |
Vegbane |
Punkt innenfor vegbane. |
12 |
Overlap Points |
Overlappunkt |
Skal ikke leveres. |
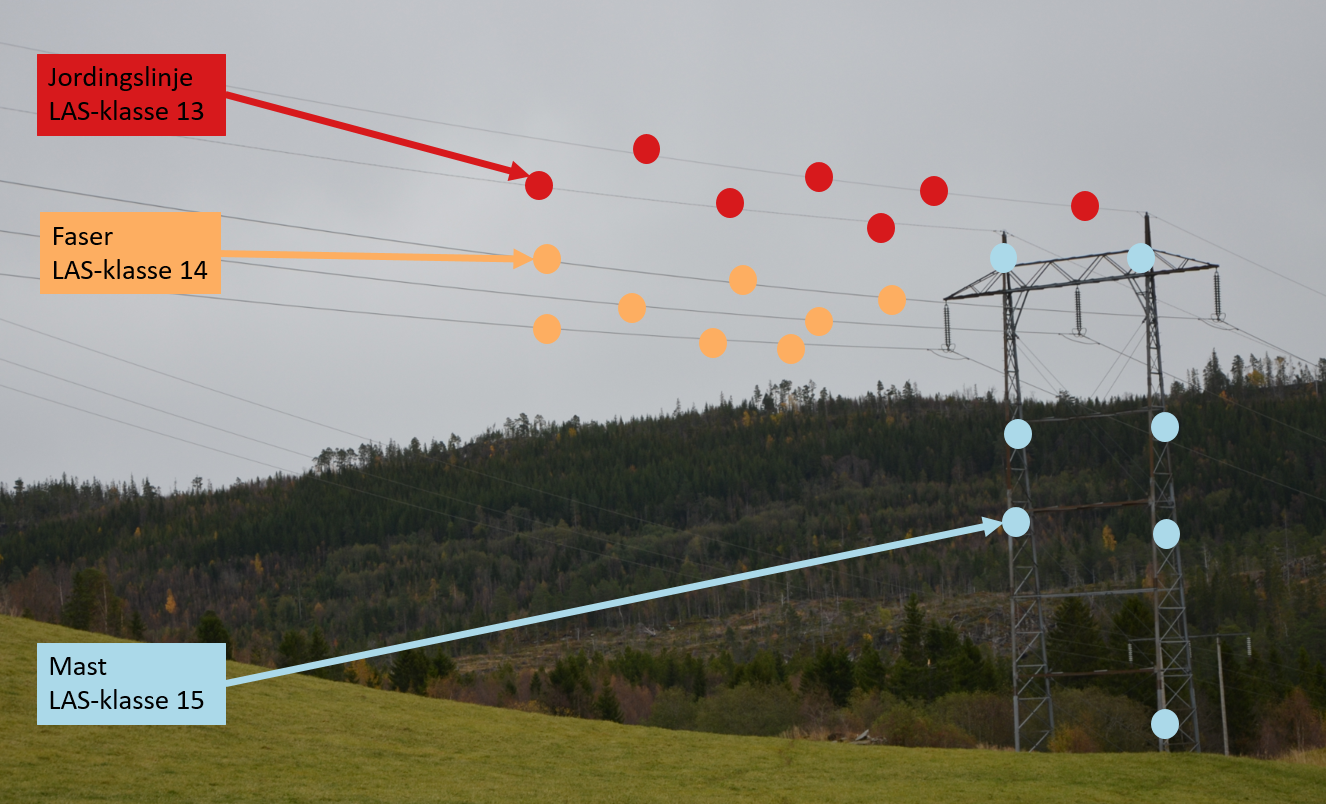
13 |
Wire Guard |
Ledning - Beskyttelse |
Jordingslinje (Fargelegges |
14 |
Wire Conductor |
Ledning |
Luftledning (Fargelegges |
15 |
Transmission Tower |
Mast |
Mast (Fargelegges |
16 |
Wire-Structure |
Ledning - Kobling (isolasjon) |
Skal ikke leveres. |
17 |
Bridge-Deck |
Brodekke |
Minstemål for klassifisering er 10 m2. Alle punkter på selve brodekket skal klassifiseres til bro (Klasse 17). Alle andre punkter på bro skal klassifiseres til uklassifisert (1) eller korrekt klasse i eventuell opsjon. |
18 |
High Noise |
Støy Høy |
Skal ikke leveres. |
19 |
Overhead Structure |
Markør Luftspenn (Fargelegges |
|
20 |
Ignored Ground |
Skal ikke leveres. |
|
21 |
Snow |
Snø |
Punkter innenfor snøflater større enn 1000m2 skal klassifiseres til 'Snø'. |
22 |
Temporal Exclusion |
Temporalt Utelukket |
I overlappen mellom to flater med tidsbestemt nivåforskjell kan klasse 22 benyttes til å isolere det ene nivået. Eksempel på tidsbestemt endring er snøsmelting og forskjellig vannstand. |
23 |
Reserved |
||
24 |
Reserved |
||
25 |
Reserved |
||
26 |
Reserved |
||
27 |
Reserved |
||
28 |
Reserved |
||
29 |
Reserved |
||
30 |
Reserved |
||
31 |
Reserved |
||
32-39 |
Reserved |
||
40 |
Seafloor Bathy |
Havbunn |
Punkt som faller på sjøbunn eller elvebunn. |
41 |
Watersurface Bathy |
Vannoverflate |
Punkter på vannoverflate. |
42 |
Watersurface Derived |
Vannoverflate Generert |
Genererte punkt på vannoverflate som er benyttet i beregning av refraksjon. |
43 |
Object - Submerged |
Marin Vegetasjon |
Må defineres per prosjekt. |
44 |
IHO object |
IHO-objekt |
Må defineres per prosjekt. |
45 |
No Bottom |
Ikke bunn (uklassifisert) |
Må defineres per prosjekt. |
46-63 |
Reserved |
Reservert. |
|
64-255 |
User definable |
Alle egendefinerte klasser må legges til dette intervallet. |
|
Klasse |
ASPRS Beskrivelse |
Beskrivelse |
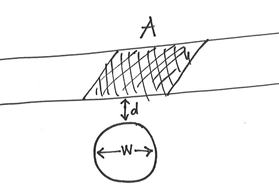
14.1. Presisering Klasse 17 - Bro
For at et bruobjekt skal klassifiseres som klasse 17 (brudekke) må følgende være innfridd:
-
A - Areal av brudekke må være mer enn 10m2.
-
d - Avstand brudekke ned til topp underløp mindre enn 1m.
-
W - Bredde av underløp større enn 2m.
14.2. Presisering Klasse 13, 14, 15 - Ledningsklasser
For klassifisering av ledningstema skal følgende tolkning ligge til grunn:
14.3. Presisering Klassifisering av Damkonstruksjoner
For damkonstruksjoner skal følgende klassifiseringsregime benyttes:
-
Punkt som faller på damkonstruksjoner som aktivt holder vann tilbake skal legges til klasse 2 (bakke).
-
Punkt punkt som faller på infrastruktur (lukehus, rekkverk, master) legges til uklassifisert (1) eller korrekt klasse i eventuell opsjon.
-
Punkt som faller på brodekke over demningselement skal legges til klasse 17 (brodekke).
15. Appendix B - Høydedata.no
Alle punktskydata skal forvaltes i høydedata.no. Forvaltningsløsningen (FvL) serverer rådatasett, avledede grid med varierende oppløsning, samt enkle visualiseringer i 2D og 3D.
Punktskyene som holdes i FvL må sees i sammenheng med produktspesifikasjonen som var gjeldende når datasettet ble etablert og lagt inn i FvL. Dette kommuniseres ved hjelp av attributt '..OBJEKTKATALOG' i visningstjeneste og i metadatasett ved eksport. Informasjon om delspesifikasjon finnes i attributt ' ..FKB-LASERSTANDARD'. Ved overgang til ny spesifikasjon oppgraderes ikke punktskydatasettene.
Primærdatasettet i FvL er punktskyen, og alle produkt avledes fra denne automatisk. Dette sikrer en effektiv prosesseringsflyt, men bortfall av manuell editering kan gi visse artefakter i prosjektgrid og i nasjonale grid.
Prosesseringsflyten i FvL er:
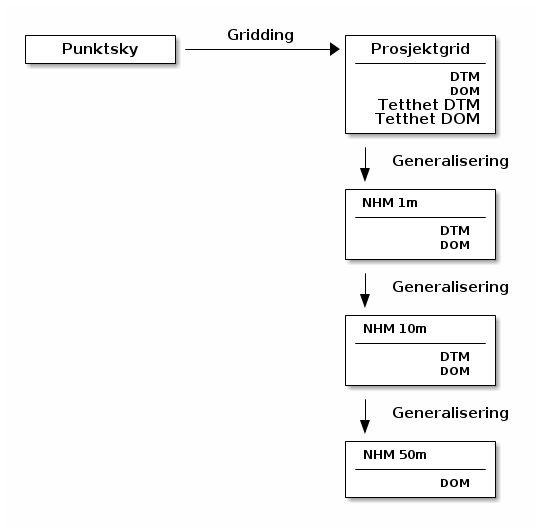
Terrengmodellene (DTM) generes fra klassene 2 (bakke) og 21 (snø) for topografiprosjekt, og for batymetri benyttes klassene 2 (bakke), 21 (snø) og 40 (havbunn). Terreng og batymetrigrid blir generert med primærmetode "Triangulate with Natural Neighbor Interpolation", og sekundærmetode "Bin with Average Value" om primærmetode feiler grunnet for lange triangelsider. DTM punkttetthet blir generert med metoden "Point Count" på relevante klasser.
Overflatemodellene for topografigrid blir generert av alle klaser utenom [0, 7, 8, 12, 18]. For batymetri benyttes alle klasser utenom [0, 7, 8, 9, 12, 18, 41 og 42]. Overflatemodellene genereres med metoden "Bin with Maximum Value" og hull fylles etterpå med "Natural Neighbour Interpolation". Tetthetsplottene generes med metoden "Pulse Count".
Oppløsningen på prosjektgridene bestemmes av punkttetthet i henhold til følgende tabell:
Punktsky LiDAR |
|
0 < = tetthet < 2 |
1m x 1m grid |
2 < = tetthet < 4 |
0.50m x 0.50m grid |
4 < = tetthet |
0.25m x 0.25m grid |
Punktsky Bildematching |
|
0 < = tetthet < 2 |
1m x 1m grid |
2 < = tetthet < 10 |
0.50m x 0.50m grid |
10 < = tetthet |
0.25m x 0.25m grid |
For gjeldende funksjonalitet refereres til hjelpetekst tilgjengelig på høydedata.no.
Lisensvilkår
Lisens
Denne standarden er gitt ut under norsk lisens for offentlige data (NLOD).
Du har lov til:
-
å kopiere og tilgjengeliggjøre
-
å endre og/eller sette sammen med andre datasett
-
å kopiere og tilgjengeliggjøre en endret eller sammensatt versjon
-
å benytte datasettet kommersielt
På følgende vilkår:
-
at du navngir lisensgiver slik lisensgiver ber om, men ikke på en måte som indikerer at disse har godkjent eller anbefaler deg eller din bruk av datasettet
-
at du ikke bruker dataene på en måte som fremstår som villedende, og heller ikke fordreier eller uriktig fremstiller dataene
Med den forståelse:
-
at data som inneholder personopplysninger og er taushetsbelagt ikke er omfattet av denne lisensen og ikke kan viderebrukes
-
at lisensgiver fraskriver seg ethvert ansvar for informasjonens kvalitet og hva informasjonen brukes til